Что такое модельно-прогностическое управление (MPC)?
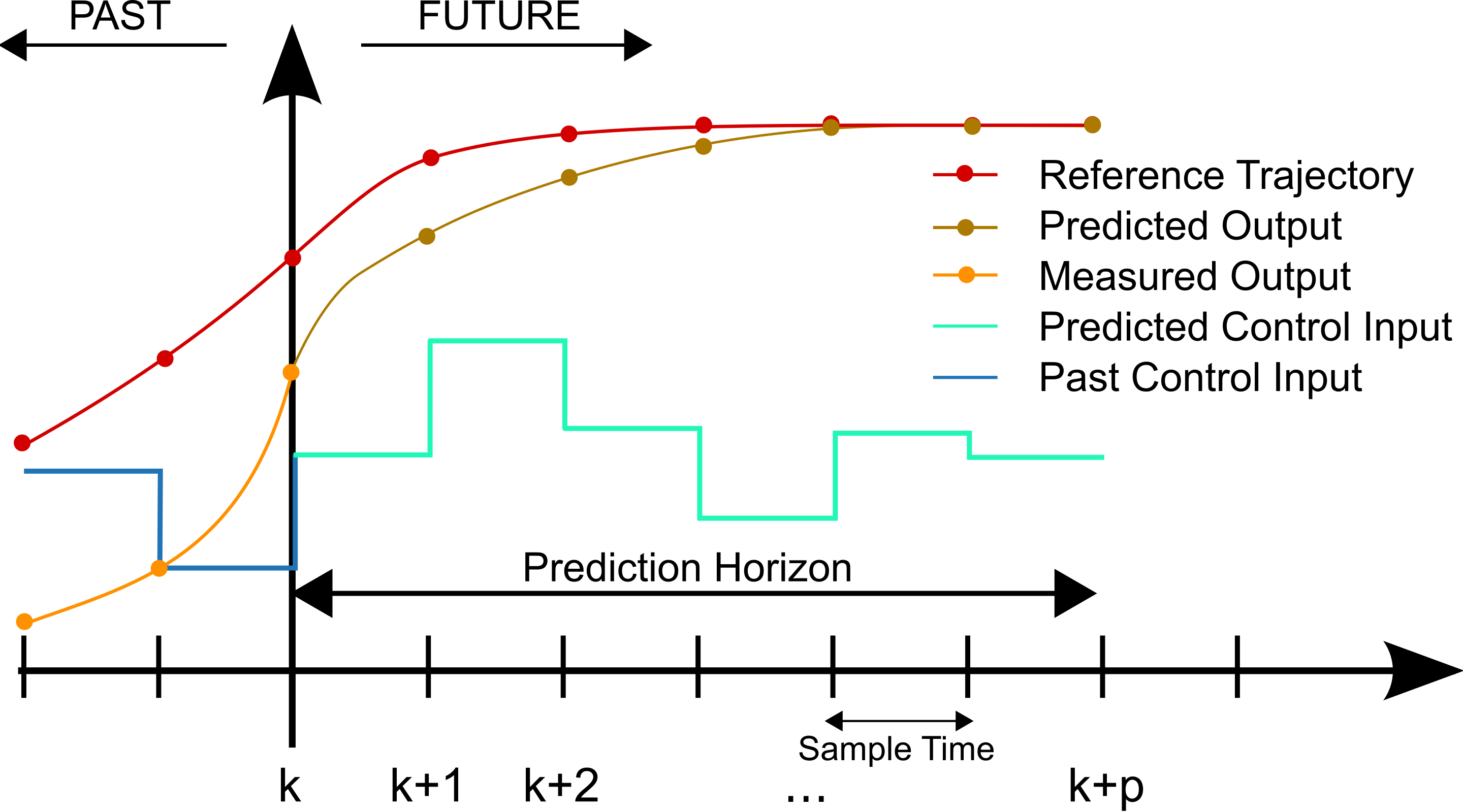
Модель прогнозирующего управления (MPC), также называемая управлением движущимся горизонтом или управлением удаляющимся горизонтом, является широко используемой стратегией управления, которая применялась во многих областях, включая управление технологическими процессами, робототехнику и автономные системы. Центральный принцип MPC заключается в том, чтобы предсказывать будущее поведение с помощью математической модели системы, а затем использовать эти знания для создания управляющих действий, которые максимизируют некоторую цель производительности. Теперь MPC может работать со все более сложными системами и сложными задачами управления благодаря многолетним постоянным улучшениям и усовершенствованиям. Как показано на рисунке ниже, в каждом контрольном интервале алгоритм MPC вычисляет последовательность горизонта управления без обратной связи, чтобы оптимизировать поведение объекта в горизонте прогнозирования.
Одной из последних разработок в MPC является интеграция методов машинного обучения, что привело к разработке MPC на основе машинного обучения (ML-MPC). В этом подходе алгоритмы машинного обучения используются для оценки модели системы, прогнозирования и оптимизации управляющих воздействий. Такое сочетание машинного обучения и MPC может значительно повысить производительность и эффективность управления.
В этом сообщении блога мы сравним MPC на основе моделей (стандартный MPC) с ML-MPC, выделив их преимущества и недостатки.
MPC на основе модели
Фундаментальная идея MPC на основе моделей заключается в постановке и решении задачи оптимизации на каждом временном шаге. Задача оптимизации учитывает текущее состояние системы, прогнозируемое поведение в будущем и желаемые цели производительности. Затем система подвергается максимально возможному контролю, и процесс повторяется на следующем временном шаге.
Преимущества MPC на основе моделей:
- Математическая достоверность. MPC на основе моделей основан на математических моделях системы, которые обеспечивают высокую степень достоверности поведения системы. Это позволяет делать точные прогнозы и разрабатывать эффективную политику контроля.
- Обработка сложных систем: MPC на основе моделей может обрабатывать сложные системы, включая линейные и нелинейные системы, системы с одним входом и одним выходом (SISO) и системы с несколькими входами и несколькими выходами (MIMO), что делает его подходящим для широкого спектра применений.
- Обработка ограничений. MPC на основе моделей может обрабатывать различные ограничения, такие как жесткие ограничения (например, физические ограничения) и мягкие ограничения (например, целевые показатели производительности), что делает его универсальной стратегией управления.
- Надежная производительность. MPC на основе моделей имеет надежную производительность, что означает, что он может обеспечить стабильное и точное управление даже при наличии помех и неопределенности.
- Хорошо зарекомендовавшая себя теория и алгоритмы. Традиционный MPC тщательно изучался и развивался на протяжении многих лет, и существует множество доступных проверенных алгоритмов и методов.
Недостатки модели MPC:
- Точность модели. Производительность MPC на основе модели зависит от точности модели. Если модель неточна, эффективность управления будет низкой.
- Сложность модели. MPC на основе моделей может быть сложным в разработке и реализации, особенно для сложных систем.
- Обслуживание модели.MPC на основе модели требует регулярного обслуживания, включая обновление модели для отражения изменений в системе.
MPC на основе машинного обучения
ML-MPC использует другой подход к управлению, используя алгоритмы машинного обучения для оценки модели системы, создания прогнозов и создания управляющих действий. Основная идея ML-MPC заключается в использовании моделей, управляемых данными, для преодоления ограничений традиционного MPC.
Преимущества MPC на основе машинного обучения:
- Модели, управляемые данными. MPC на основе машинного обучения использует модели, управляемые данными, для прогнозирования и управления системой. Это позволяет учиться на данных и улучшать эффективность управления с течением времени.
- Адаптация к меняющимся условиям. MPC на основе машинного обучения может адаптироваться к меняющимся условиям в режиме реального времени, что делает его пригодным для динамичных и непредсказуемых систем.
- Повышенная точность. MPC на основе машинного обучения может обеспечить более высокую точность по сравнению с MPC на основе моделей, особенно в сложных и сложных для моделирования системах.
- Уменьшение сложности модели. MPC на основе машинного обучения может снизить сложность модели, упростив ее внедрение и обслуживание.
- Повышенная эффективность вычислений.Алгоритмы машинного обучения предназначены для обработки больших объемов данных и могут выполнять ресурсоемкие вычислительные задачи намного быстрее, чем традиционные алгоритмы MPC.
Недостатки MPC на основе машинного обучения:
- Требования к данным. MPC на основе машинного обучения требует больших объемов данных для обучения моделей. Если данные ограничены или необъективны, эффективность контроля будет низкой.
- Прозрачность модели. MPC на основе машинного обучения может быть сложно интерпретировать и понять, что затрудняет диагностику и устранение проблем.
- Обобщение модели: MPC, основанный на машинном обучении, может с трудом обобщать новые ситуации, особенно если обучающие данные не отражают весь диапазон поведения системы. Это может произойти из-за переобучения или недообучения модели ML.
- Безопасность модели. MPC на основе машинного обучения не всегда может создавать безопасные и надежные политики управления, особенно если обучающие данные включают опасные или неэтичные сценарии.
Сравнение MPC на основе моделей и ML-MPC
При сравнении MPC на основе моделей и ML-MPC необходимо учитывать несколько факторов, в том числе производительность, сложность, стоимость и гибкость.
Производительность:
ML-MPC может обеспечить улучшенную эффективность управления по сравнению с MPC на основе моделей, особенно в случаях, когда модель системы неопределенна или неизвестна.
Однако фактическая производительность ML-MPC будет зависеть от качества данных, используемых для обучения моделей машинного обучения, и выбора алгоритмов машинного обучения.
Сложность:
ML-MPC может быть более сложным в реализации по сравнению с MPC на основе моделей, поскольку требует опыта как в области управления, так и в области машинного обучения. Однако после обучения моделей машинного обучения ML-MPC может быть более эффективным в вычислительном отношении, чем традиционный MPC, особенно для больших и сложных систем.
Стоимость:
Стоимость внедрения ML-MPC может быть выше по сравнению с MPC на основе моделей из-за необходимости больших объемов данных и использования специализированных алгоритмов машинного обучения. Однако долгосрочные выгоды от улучшенных характеристик контроля могут компенсировать эти затраты.
Гибкость:
ML-MPC может быть более гибким, чем MPC на основе моделей, поскольку он может обрабатывать более широкий спектр систем и задач управления. Однако выбор алгоритмов машинного обучения окажет значительное влияние на гибкость ML-MPC.
Заключение
В заключение, как MPC на основе моделей, так и MPC на основе машинного обучения имеют свои уникальные сильные и слабые стороны, и выбор стратегии управления будет зависеть от конкретных требований приложения. Оба подхода потенциально могут обеспечить эффективный и действенный контроль, и каждый из них имеет свои уникальные преимущества и недостатки.
Понятно, что как MPC на основе моделей, так и MPC на основе машинного обучения играют определенную роль в современных системах управления, и каждый из них имеет свои сильные стороны, которые можно использовать в различных приложениях. В будущих сообщениях блога мы углубимся в тему MPC на основе машинного обучения и предоставим примеры кода различных алгоритмов ML-MPC, демонстрирующие практическую реализацию этих методов в реальных приложениях. Оставайтесь с нами для более интересных обновлений и идей в этой захватывающей области систем управления.
Рекомендации
- Роулингс, Дж. Б., Мейн, Д. К., и Санчес, Дж. (2017). Модель прогнозирующего управления: теория и дизайн. Издательство Ноб Хилл.
- Косич Д., Гао Ю. и Цяо З. (2019). Прогностическое управление моделями на основе машинного обучения: опрос. Автоматика, 109, 1–18.
- Чен Ю. и Дуань К. (2015). Машинное обучение для систем управления. Ежегодный обзор управления, робототехники и автономных систем, 8, 1–17.
- https://en.wikipedia.org/wiki/Model_predictive_control